[DeepLearning.AI] Course2.W2 Improving Deep Neural Networks
Mini Batch Gradient Descent (C2W2L01)
1. 대규모 데이터와 최적화의 필요성
딥러닝은 빅데이터 환경에서 가장 잘 작동하지만, 데이터셋이 클수록 훈련 속도가 느려진다. Vectorization를 사용하면 $m$개의 샘플을 효율적으로 계산할 수 있지만 $m$이 500만 개처럼 매우 큰 경우에는 여전히 처리가 느리다.
2. 배치 경사 하강법의 한계와 미니배치 도입
기존의 배치 경사 하강법은 단 한 번의 매개변수 업데이트를 수행하기 위해 500만 개의 전체 훈련 데이터를 모두 처리해야 한다. 더 빠른 알고리즘을 위해 전체 훈련 세트를 작은 단위인 ‘Mini-batch’ 로 나눈다.
500만 개의 데이터를 1,000개씩 묶어 총 5,000개의 미니배치를 만들 수 있다.
3. 표기법(Notation) 정의
새로운 표기법 $X^{{t}}, Y^{{t}}$가 도입된다.
$(i)$: $i$번째 훈련 샘플
$[l]$: $l$번째 신경망 층
${t}$: $t$번째 미니배치
미니배치 크기가 1,000이라면 $X^{{t}}$의 차원은 $(n_x, 1000)$, $Y^{{t}}$의 차원은 $(1, 1000)$이 된다.
4. 미니배치 경사 하강법 알고리즘 구조
전체 데이터를 한 번에 처리하는 ‘배치 경사 하강법’과 달리 ‘미니배치 경사 하강법’은 한 번에 하나의 미니배치($X^{{t}}, Y^{{t}}$)만을 사용하여 학습을 진행한다.
반복문(Loop):
$t=1$부터 5,000까지(미니배치 개수만큼) 반복한다.
정방향 전파(Forward Propagation):
전체 $X$ 대신 $X^{{t}}$를 사용하여 입력부터 출력까지 계산한다. 이때 1,000개 샘플에 대해 벡터화된 연산을 수행한다.
비용 계산(Cost Computation):
해당 미니배치에 대한 비용 $J^{{t}}$를 계산한다.
역전파(Backpropagation):
$J^{{t}}$에 대한 Gradient를 계산한다.
매개변수 업데이트:
가중치 $W$와 편향 $b$를 업데이트한다 ($W^{[l]} = W^{[l]} - \alpha dW^{[l]}$).
5. 에포크(Epoch)와 학습 속도 비교
훈련 세트 전체를 한 번 도는 과정을 1 Epoch라고 한다.
배치 경사 하강법:
1 에포크당 1번의 경사 하강(업데이트)만 일어난다.
미니배치 경사 하강법:
1 에포크당 5,000번의 경사 하강(업데이트)이 일어난다.
데이터셋이 클 경우: 미니배치 경사 하강법이 훨씬 빠르게 수렴
이것이 대규모 데이터 학습에 표준적으로 사용되는 이유이다.
Understanding Mini-Batch Gradient Descent (C2W2L02)
1. 미니배치 경사 하강법의 비용 함수 그래프 특징
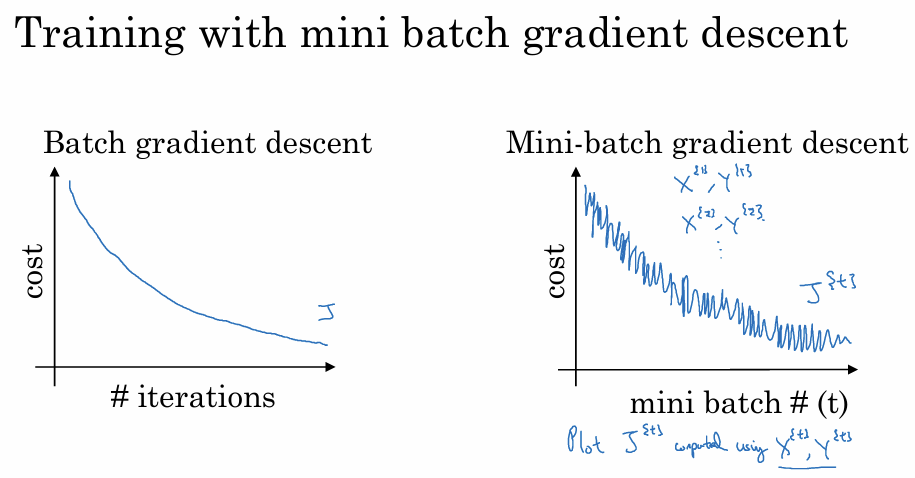
전체 훈련 세트를 사용하는 Batch Gradient Descent은 반복할 때마다 비용 함수 $J$가 반드시 감소해야 한다.
반면, 미니배치 경사 하강법은 매 반복마다 서로 다른 미니배치($X^{{t}}, Y^{{t}}$)를 사용하기 때문에 그래프가 매번 감소하지 않고 Noise가 발생한다.
특정 미니배치가 다른 미니배치보다 더 어렵거나 잘못 라벨링된 데이터를 포함할 수 있기 때문이지만 전체적인 흐름은 비용이 감소하는 방향으로 진행된다.
2. 미니배치 크기에 따른 두 가지 극단적인 경우
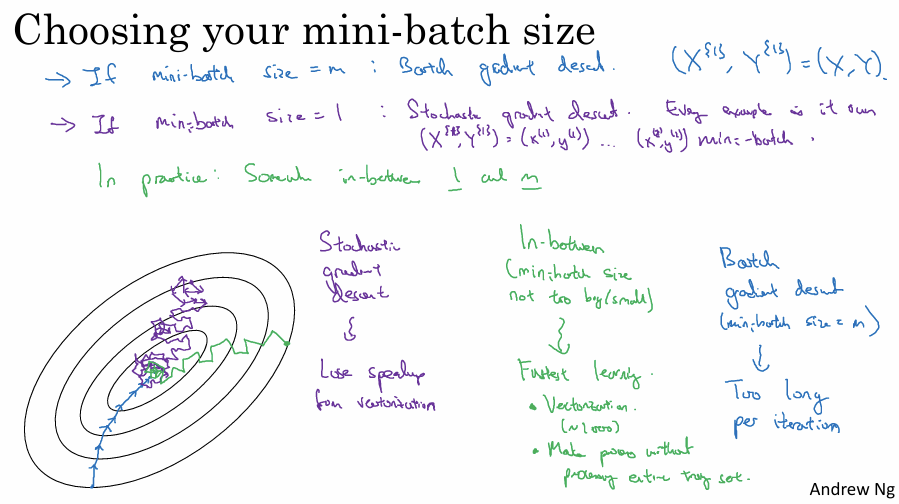
크기 = $m$ (전체 데이터 크기):
배치 경사 하강법과 동일. 하나의 거대한 미니배치만 존재한다.
크기 = 1:
이를 Stochastic Gradient Descent, SGD이라고 하며 각 샘플 하나하나가 각각의 미니배치가 된다.
3. 확률적 경사 하강법(SGD)과 배치 경사 하강법의 비교
배치 경사 하강법:
노이즈가 적고 최솟값을 향해 꾸준히 나아가지만 데이터가 클 경우 한 번의 Step를 밟는 데 너무 오랜 시간이 걸린다.
확률적 경사 하강법(SGD):
매 샘플마다 업데이트를 하므로 빠르지만 방향이 잘못될 수도 있어 헤매면서 전역 최솟값 주변을 맴돌 뿐 영원히 수렴하지 않을 수 있다.
큰 단점은 한 번에 하나의 샘플만 처리하므로 Vectorization를 통한 속도 향상의 이점을 잃게 된다.
4. 최적의 선택: 중간 크기의 미니배치
실제로는 1과 $m$ 사이의 미니배치 크기를 선택하는 것이 가장 효율적이다. 이 방식은 다음과 같은 두 가지 장점을 가진다.
벡터화 활용:
1,000개 정도의 샘플을 묶어 처리하면 벡터화의 이점을 살려 계산 속도를 높일 수 있다.
빠른 학습:
전체 데이터를 다 볼 때까지 기다리지 않고도 파라미터를 업데이트할 수 있다. 적절한 미니배치 크기를 사용하면 최솟값 영역으로 더 일관되게 접근하며 수렴하지 않고 진동하는 문제는 Learning rate를 줄여서 해결할 수 있다.
5. 미니배치 크기 설정 가이드라인
작은 데이터셋 ($m < 2000$):
그냥 배치 경사 하강법을 사용하는 것이 좋다.
큰 데이터셋:
일반적으로 64에서 512 사이의 값을 사용한다.
2의 제곱수 사용:
컴퓨터 메모리 접근 효율을 위해 $2^6(64), 2^7(128), 2^8(256), 2^9(512)$와 같이 2의 제곱수를 사용하는 것이 코드를 더 빠르게 실행시킨다.
메모리 확인:
선택한 미니배치 크기가 CPU나 GPU 메모리에 맞는지 확인해야 한다. 그렇지 않으면 성능이 급격히 저하될 수 있다.
6. 하이퍼파라미터 튜닝
결국 미니배치 크기는 또 하나의 하이퍼파라미터이므로, 여러 2의 제곱수 값들을 시도해보며 비용 함수를 가장 효율적으로 줄이는 값을 찾아야 한다.
Exponentially Weighted Averages (C2W2L03)
1. 지수가중평균(Exponentially Weighted Averages)의 필요성 도입
경사 하강법보다 빠른 최적화 알고리즘들
‘지수가중이동평균’이라 불리는 ‘지수가중평균’ : 최근 데이터에 더 큰 가중치를 주고, 오래된 데이터일수록 영향력을 지수적으로 감소시켜 계산하는 평균 방식
작년 런던의 일별 기온 데이터. 이 데이터는 여름에 따뜻하고 겨울에 추운 경향이 있지만 매일의 데이터에는 노이즈가 섞여 있다. 이 데이터의 전반적인 흐름(지역 평균 또는 이동 평균)을 파악하기 위해 지수가중평균을 사용한다.
2. 공식의 정의와 의미
지수가중평균을 구하는 공식 \(V_t = \beta V_{t-1} + (1-\beta)\theta_t\)
$V_t$: $t$ 시점의 지수가중평균 값
$\theta_t$: $t$ 시점의 실제 데이터 (오늘의 기온)
$\beta$: 가중치를 결정하는 하이퍼파라미터
$\beta$가 0.9일 때 $V_t$는 대략 $1/(1-\beta)$일 동안의 기온 평균 과 같다.
$\beta=0.9$라면 $1/(1-0.9)=10$이므로 약 10일간의 평균을 나타내는 곡선이 그려진다.
3. 베타($\beta$) 값에 따른 변화 1: 값이 클 때
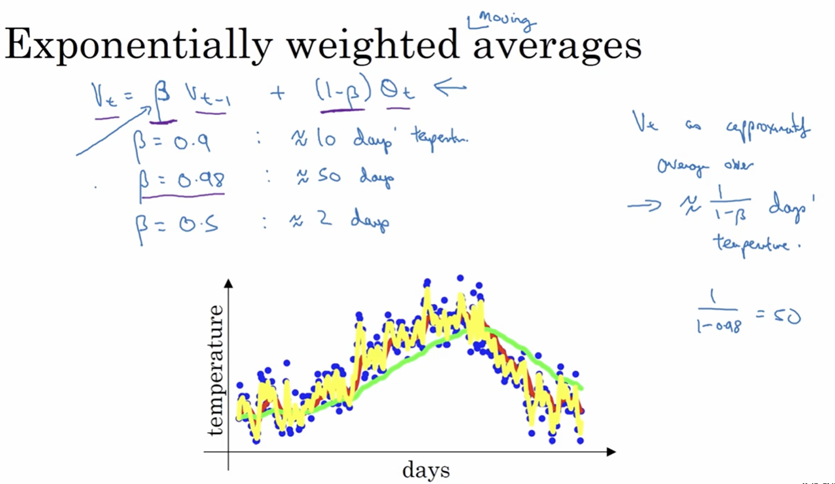
$\beta$를 1에 매우 가까운 값인 0.98로 설정하면, $1/(1-0.98)=50$이므로 약 50일간의 기온 평균을 구하게 된다 (초록색 선).
장점:
더 많은 날짜의 평균을 내므로 곡선이 훨씬 부드러워진다.
단점:
기온이 변할 때 적응하는 속도가 느려진다. 이전 값($V_{t-1}$)에 너무 큰 가중치를 주고 현재 값($\theta_t$)에는 작은 가중치를 주다 보니 실제 데이터의 변화를 따라가는 데 지연이 발생한다.
4. 베타($\beta$) 값에 따른 변화 2: 값이 작을 때
반대로 $\beta$를 0.5로 설정하면, $1/(1-0.5)=2$이므로 약 2일간의 평균을 구하는 것과 같다 (노란색 선).
장점:
기온 변화에 빠르게 적응한다.
단점:
평균을 내는 기간이 너무 짧아 노이즈가 심하고 outliers에 민감하게 반응한다.
5. 하이퍼파라미터 튜닝
결국 $\beta$는 학습 알고리즘의 하이퍼파라미터이다. 이 값을 조절함으로써 노이즈를 줄이면서도 변화에 적절히 반응하는 빨간색 선과 같은 최적의 값을 찾아야 한다.
ai: “운전할 때 얼마나 멀리 보느냐” 와 비슷하다.
$\beta$가 높음 (0.98):
아주 먼 과거의 길까지 다 고려해서 핸들을 꺾는 것이다. 승차감은 부드럽겠지만(부드러운 곡선), 급커브가 나왔을 때 반응이 늦어질 수 있다.
$\beta$가 낮음 (0.5):
바로 코앞의 도로만 보고 핸들을 꺾는 것이다. 커브에 즉각 반응하지만, 도로의 작은 요철에도 핸들이 심하게 흔들릴 수 있다(노이즈). 우리는 이 둘 사이에서 가장 적절한 시야($\beta=0.9$ 등)를 찾아야 한다.
Understanding Exponentially Weighted Averages (C2W2L04)
1. 지수가중평균 수식
\(V_t = \beta V_{t-1} + (1-\beta)\theta_t\) 이 수식이 실제로 어떻게 작동하는지 이해하기 위해 $V_{100}$을 예로 들어 수식을 역순으로 푼다.
$V_{100} = 0.1\theta_{100} + 0.9V_{99}$ 여기에 $V_{99}$ 등을 계속 대입하여 확장하면 $V_{100} = 0.1\theta_{100} + 0.1(0.9)\theta_{99} + 0.1(0.9)^2\theta_{98} + …$ 와 같은 형태가 된다.
지수가중평균은 각 시점의 데이터($\theta$)에 지수적으로 감소하는 가중치를 곱하여 모두 더한 값이다.
2. 평균 기간을 정하는 기준
$\beta$ 값에 따라 ‘며칠 동안의 평균’인지 결정하는 수학적 원리.
$(1-\epsilon)^{1/\epsilon} \approx 1/e$ (약 0.35)라는 수학적 극한을 활용한다.
$\beta=0.9$일 때:
가중치가 약 $1/3$로 줄어드는 데 10일이 걸리므로 약 10일간의 평균으로 본다.
오늘(1), 어제($0.9$), 그제($0.9^2=0.81$), … 10일 전($0.9^{10} \approx 0.35$)
$\beta=0.98$일 때:
가중치가 줄어드는 데 약 50일이 걸리므로 약 50일간의 평균이 된다.
$1/(1-\beta)$일 동안의 평균이라고 생각할 수 있다.
오늘(1), 어제($0.98$), … 50일 전($0.98^{50} \approx 0.36$)
3. 구현 알고리즘과 메모리 효율성
간단하다
$v$를 0으로 초기화한 뒤 반복문을 통해 매일 새로운 데이터($\theta_t$)가 들어올 때마다 $v := \beta v + (1-\beta)\theta_t$로 단 하나의 변수만 업데이트하면 된다.
과거 10일이나 50일 치 데이터를 모두 배열에 저장하고 평균을 내는 방식보다 실수 하나만 사용하기 때문에 메모리 사용량이 적고 계산 비용이 저렴하다.
ai: 이 알고리즘의 효율성은 “가계부 정리” 에 비유할 수 있다.
일반적인 평균 계산법: 지난 50일 치 영수증을 모두 서랍에 보관했다가 매번 꺼내서 다시 계산하는 방식
지수가중평균: 머릿속에 현재의 대략적인 지출 흐름이라는 숫자 하나만 기억해두고 오늘 쓴 돈을 반영해 그 숫자만 살짝 수정하는 것.
영수증을 보관할 서랍(메모리)이 필요 없어 매우 가볍고 빠르다.
Bias Correction of Exponentially Weighted Averages (C2W2L05)
1. 초기 단계의 Bias 문제 발생
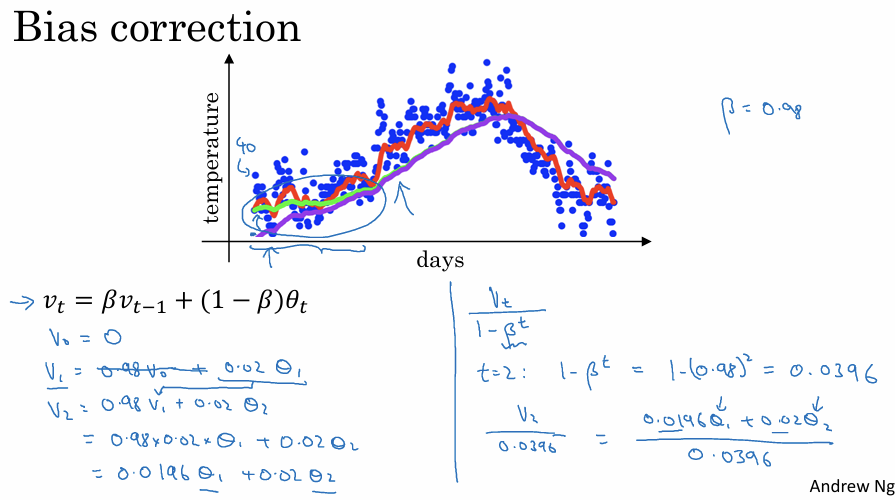
지수가중평균을 구현할 때 $v_0$를 0으로 초기화하면 학습 초기 단계에서 계산된 값이 실제 데이터보다 현저히 낮게 나오는 현상(보라색 곡선)이 발생한다.
$\beta=0.98$이고 첫날($t=1$)의 온도가 40도라면 $v_1 = 0.98 \times 0 + 0.02 \times 40 = 8$이 되어 실제 값인 40도를 전혀 반영하지 못하게 된다.
2. 편향 보정(Bias Correction) 공식 도입
이러한 초기 추정 오차를 해결하고 더 정확한 평균(초록색 곡선)을 얻기 위해 편향 보정을 사용한다. 단순히 $v_t$를 사용하는 대신 다음 공식을 사용한다. \(\frac{v_t}{1 - \beta^t}\) 여기서 $t$는 현재 시점이다.
$t=2, \beta=0.98$일 때 분모는 $1 - (0.98)^2 = 0.0396$이 되며, 작게 계산된 $v_t$ 값을 이 작은 수로 나누어줌으로써 스케일을 정상 범위로 보정해준다.
3. 시간이 지남에 따른 효과 감소
시간 $t$가 커질수록 $\beta^t$ 값은 0에 가까워지므로 분모인 $(1 - \beta^t)$는 1에 수렴하게된다. 데이터가 충분히 쌓인 후반부에는 편향 보정의 영향력이 사라져 보정을 한 곡선과 하지 않은 곡선이 거의 겹치게 된다.
편향 보정은 주로 초기 단계(warm-up phase)의 정확도를 높인다.
4. 머신러닝에서의 실제 활용
실제 머신러닝 구현에서는 초기 단계의 부정확함을 그냥 기다려서 지나보내는 방식(warm-up)을 사용하여 편향 보정을 생략하는 경우도 많다. 하지만 초기 학습 단계부터 정확한 추정값이 필요한 상황이라면 편향 보정을 구현하는 것이 유용하다.
Gradient Descent With Momentum (C2W2L06)
1. 기본 경사 하강법의 문제점: 진동(Oscillation)
일반적인 경사 하강법이나 미니배치 경사 하강법을 타원형의 등고선(최적화 문제)에 적용하면 비효율적인 움직임이 발생한다.
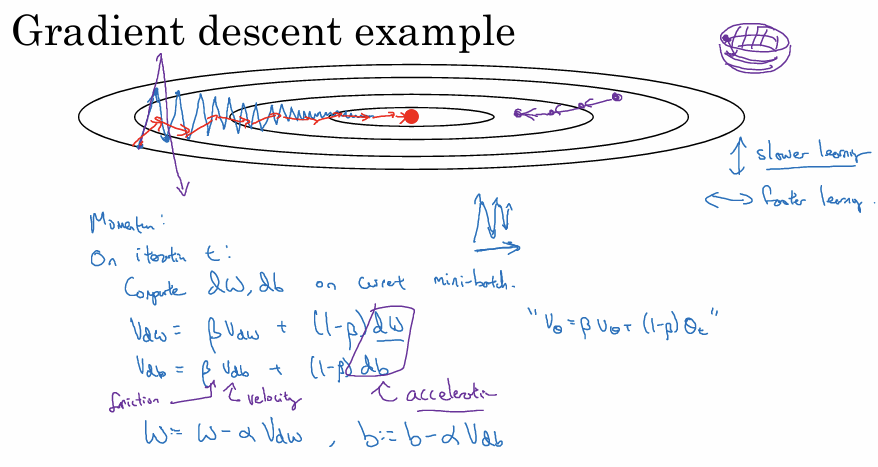
최솟값(중심)을 향해 수평 방향으로는 천천히 나아가지만 수직 방향으로는 위아래로 심하게 진동하며 움직이다.
단점:
이 진동 때문에 더 큰 Learning rate을 사용할 수 없다. 학습률을 높이면 진동이 너무 커져서 경로를 이탈할 위험이 있기 때문이다.
2. Momentum의 핵심 아이디어
우리의 목표는 수직 방향(진동)은 줄이고, 수평 방향(학습)은 빠르게 만드는 것이다. 이를 위해 Gradient에 대한 지수가중평균(Exponentially Weighted Averages)을 계산하여 가중치를 업데이트한다.
현재 미니배치의 도함수($dW, db$)를 계산한 뒤 이동 평균 $v_{dW}, v_{db}$를 구한다. \(v_{dW} = \beta v_{dW} + (1-\beta)dW\) \(v_{db} = \beta v_{db} + (1-\beta)db\)
업데이트:
기존의 $dW, db$ 대신 $v_{dW}, v_{db}$를 사용하여 파라미터를 업데이트한다. \(W = W - \alpha v_{dW}, \quad b = b - \alpha v_{db}\) $\alpha$: 학습률
3. 모멘텀의 효과
이 방식을 사용하면 지난 몇 번의 반복 동안 계산된 경사들의 평균을 구한다.
수직 방향:
양수와 음수가 번갈아 나오므로 평균을 내면 서로 상쇄되어 0에 가까워진다(진동 감소).
수평 방향:
모든 경사가 최솟값을 향해 같은 방향을 가리키므로 평균값이 크고 일정하게 유지된다(속도 증가).
진동은 줄어들고 최솟값을 향해 더 직선에 가까운 경로로 빠르게 이동하게 된다.
4. 물리적 직관
이 알고리즘은 물리적인 현상에 비유할 수 있다.
공:
파라미터가 밥그릇(비용 함수 그래프) 안을 굴러 내려간다.
Gradient:
공에 가해지는 가속도(Acceleration) 역할을 한다.
모멘텀 변수($v_{dW}, v_{db}$):
공의 속도(Velocity) 역할을 한다.
베타($\beta$):
마찰(Friction) 역할을 하여 공이 무한정 빨라지는 것을 막는다. 모멘텀 알고리즘은 매 단계마다 멈췄다 다시 출발하는 것이 아니라 가속도를 받아 속도가 붙은 공처럼 더 빠르게 최솟값으로 굴러가게 한다.
5. 구현 세부 사항 및 하이퍼파라미터
$\beta$ 설정:
가장 일반적이고 견고한 값은 0.9이다. 이는 대략 지난 10번의 반복(10일간의 평균)을 고려하는 것과 같다.
Bias Correction:
보통 모멘텀 구현에서는 초기 편향 보정 단계를 생략한다. 10번 정도 반복하면 이동 평균이 충분히 안정화되기 때문이다.
초기화:
$v_{dW}$와 $v_{db}$는 0으로 초기화한다.
6. 다른 버전의 공식
일부 논문이나 프레임워크에서는 $(1-\beta)$ 항을 생략한 공식을 사용하기도 한다 ($v_{dW} = \beta v_{dW} + dW$).
이 경우 $v_{dW}$가 $1/(1-\beta)$만큼 스케일링되므로 학습률 $\alpha$를 그에 맞춰 조정해야 한다.
강의에서는 $(1-\beta)$가 포함된 원래 공식이 하이퍼파라미터 튜닝 시 $\alpha$에 덜 영향을 주기 때문에 더 선호한다고 언급한다.
RMSProp (C2W2L07)
1. RMSProp의 도입 목적과 직관
Momentum과 마찬가지로 RMSProp(Root Mean Square Prop) 역시 경사 하강법의 속도를 높이는 알고리즘이다.
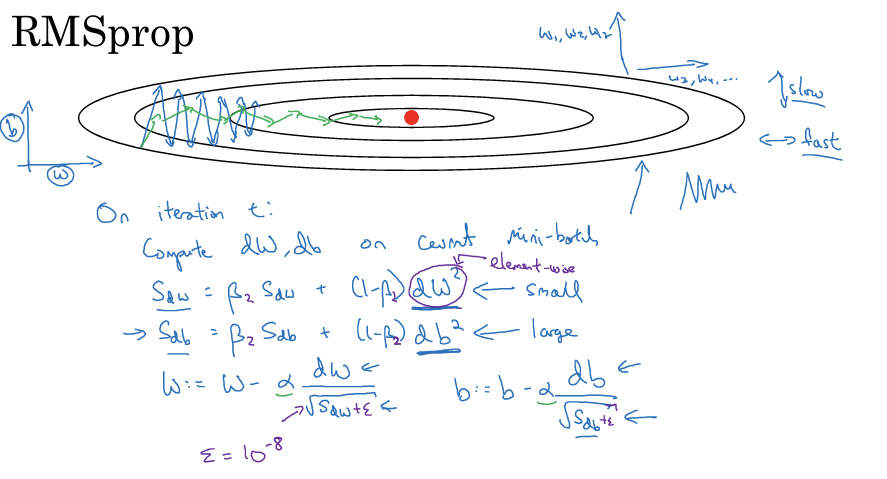
경사 하강법을 시각화했을 때, 최적값으로 향하는 수평 방향($w$)으로는 빠르게 이동하고 싶지만 불필요한 수직 방향($b$)의 진동이 커서 학습 속도가 느리다.
목표:
수직 방향(b)의 학습 속도는 늦추고(진동 억제), 수평 방향(w)의 학습 속도는 빠르게 유지
2. RMSProp 알고리즘의 공식
RMSProp은 매 반복($t$)마다 도함수의 제곱에 대한 지수가중평균을 계산한다.
새로운 변수 $S_{dw}$와 $S_{db}$를 사용.
$S_{dw} = \beta S_{dw} + (1-\beta) dw^2$
$S_{db} = \beta S_{db} + (1-\beta) db^2$ (여기서 제곱은 요소별 제곱)
업데이트:
매개변수 업데이트 시 도함수를 $S$값의 제곱근으로 나눈다.
$w := w - \alpha \frac{dw}{\sqrt{S_{dw}}}$
$b := b - \alpha \frac{db}{\sqrt{S_{db}}}$
3. 진동을 줄이는 방법
수직 방향($b$):
경사가 가파르므로 도함수 $db$가 매우 크다. 따라서 $db^2$과 $S_{db}$도 커진다. 업데이트할 때 $db$를 큰 수($\sqrt{S_{db}}$)로 나누게 되므로 결과적으로 업데이트 폭(진동)이 준다.
수평 방향($w$):
경사가 완만하여 $dw$가 작다. 따라서 $S_{dw}$도 작아지며 작은 수로 나누기 때문에 업데이트 속도가 유지되거나 가속된다.
수직 방향으로 발산하지 않으면서 더 큰 학습률($\alpha$) 을 사용할 수 있게 되어 학습 속도가 빨라진다
4. 명칭의 유래와 표기법 주의사항
도함수를 제곱(Square)하여 Mean을 내고, 업데이트 시 루트를 씌우기 때문에 RMS(Root Mean Square)Prop이라고 부른다.
하이퍼파라미터 $\beta$:
모멘텀 알고리즘과 결합하여 사용할 때 혼동을 피하기 위해 RMSProp의 $\beta$는 주로 $\beta_2$ 로 표기한다.
5. 구현 시의 팁
수학적 안정성:
구현할 때는 분모($\sqrt{S}$)가 0이 되어 계산이 폭발하는 것을 막기 위해 아주 작은 값인 $\epsilon$ 을 분모에 더한다.
Adam Optimization Algorithm (C2W2L08)
1. Adam 알고리즘의 배경과 신뢰성
딥러닝 역사에서 많은 최적화 알고리즘이 제안되었지만 특정 문제에만 잘 작동하고 일반화되지 않는 경우가 많았다.
그러나 Adam과 RMSprop은 다양한 딥러닝 아키텍처 전반에서 우수한 성능을 보여주는 드문 알고리즘으로 자리 잡았다.
Adam(Adaptive Moment Estimation) = 모멘텀(Momentum) + RMSprop
2. 초기화 및 기본 계산 단계
Adam을 구현하기 위해 먼저 $v_{dw}, s_{dw}$ 등 관련 변수들을 모두 0으로 초기화한다. 이후 iteration $t$에서 다음과 같은 단계.
기울기 계산:
현재 미니배치를 사용하여 도함수($dw, db$)를 계산한다.
Momentum 단계:
기울기의 지수가중평균을 계산한다. 하이퍼파라미터: $\beta_1$
이는 모멘텀 알고리즘의 방식과 동일하다 ($v_{dw} = \beta_1 v_{dw} + (1-\beta_1)dw$).
관성을 이용해 차가 목적지 방향으로 꾸준히 속도를 내게 도와준다 (내비게이션 및 엔진).
RMSprop 단계:
기울기 제곱의 지수가중평균을 계산한다. 하이퍼파라미터: $\beta_2$
RMSprop 방식과 동일하다 ($s_{dw} = \beta_2 s_{dw} + (1-\beta_2)dw^2$).
도로가 울퉁불퉁할 때(경사가 급격히 변할 때) 속도를 조절하여 차가 튀지 않게 잡아준다 (충격 흡수 장치).
3. Bias Correction
초기화 단계에서 발생할 수 있는 오차를 줄이기 위해 계산된 $v$와 $s$에 편향 보정을 적용한다. 학습 초기($t$가 작을 때)에 값이 0으로 편향되는 것을 막는다.
$v_{corrected} = v / (1-\beta_1^t)$
$s_{corrected} = s / (1-\beta_2^t)$
4. 매개변수 업데이트
보정된 값들을 사용하여 최종적으로 가중치를 업데이트한다. \(W = W - \alpha \frac{v_{corrected}}{\sqrt{s_{corrected}} + \epsilon}\)
모멘텀의 효과(속도 및 방향 유지)와 RMSprop의 효과(진동 감쇠)를 동시에 적용
5. 하이퍼파라미터 선택 가이드
Adam 알고리즘에는 여러 하이퍼파라미터가 있지만 일반적으로 추천되는 값들이 존재한다.
$\alpha$ (학습률):
가장 중요하며, 사용자가 직접 튜닝해서 찾아야 한다.
$\beta_1$:
모멘텀 항(1차 모멘트)으로 기본값 0.9를 주로 사용한다.
$\beta_2$:
RMSprop 항(2차 모멘트)으로 논문 저자는 0.999를 추천한다.
$\epsilon$:
분모가 0이 되는 것을 방지하는 작은 수로 $10^{-8}$을 추천하며 굳이 튜닝할 필요는 없다.
Learning Rate Decay (C2W2L09)
1. Learning Rate Decay의 필요성
Mini-batch Gradient Descent을 사용할 때 64나 128과 같은 작은 미니배치를 쓰면 계산 과정에 약간의 노이즈가 발생한다.
고정된 학습률($\alpha$)을 계속 사용하면 최적화 과정이 최솟값을 향해 가긴 하지만 정확히 수렴하지 못하고 최솟값 주변을 계속 진동한다.
학습률 감쇠를 적용하면 초기에는 큰 학습률로 빠르게 학습을 진행하고 학습이 진행될수록 학습률을 줄여서 최솟값 근처의 좁은 영역에서 진동하는 폭을 줄여 더 정밀하게 수렴할 수 있다.
2. 기본 구현 방법과 수식
에포크: 전체 훈련 데이터를 한 번 훑는 것
가장 기본적인 감쇠 공식: \(\alpha = \frac{1}{1 + \text{decay\_rate} \times \text{epoch\_num}} \alpha_0\) decay_rate(감쇠율): 튜닝해야 할 하이퍼파라미터
epoch_num: 현재 에포크 횟수
에포크가 늘어날수록 학습률이 점차 감소한다.
3. 다양한 감쇠 방법들
지수적 감쇠(Exponential Decay):
$\alpha = 0.95^{\text{epoch_num}} \times \alpha_0$ 와 같이 1보다 작은 수를 거듭제곱하여 학습률을 기하급수적으로 빠르게 감소시킨다.
제곱근 감쇠:
$\frac{k}{\sqrt{\text{epoch_num}}} \times \alpha_0$ 또는 미니배치 번호 $t$를 사용하여 $\frac{k}{\sqrt{t}} \times \alpha_0$와 같은 방식을 사용한다.
Discrete Staircase:
특정 시간이 지나거나 몇 에포크마다 학습률을 절반으로 뚝 떨어뜨리는 방식이다.
4. 수동 감쇠(Manual Decay)와 중요도
모델 훈련에 며칠이 걸리는 경우 개발자가 훈련 과정을 지켜보다가 학습 속도가 느려지거나 정체될 때 직접 수동으로 학습률을 낮추는 방법. 이는 훈련하는 모델의 수가 적을 때 유효한 방법이다.
학습률 감쇠가 훈련 속도를 높이고 성능에 도움을 주지만 다른 하이퍼파라미터 튜닝(특히 초기 학습률 $\alpha$ 자체의 설정)에 비해 우선순위는 낮다.